CAN traffic produced by the Engine ECU simulating with CANtrace
CAN networks can be used as an embedded communication system for microcontrollers as well as an open communication system for intelligent devices
It is a recommended practice that defines which and how the data is communicated between the Electronic Control Units (ECU) within a vehicle network. If the control system is CAN based the ideal way of updating the software is to use CAN-bus. SAE J1939 is the vehicle bus recommended practice used for communication and diagnostics among vehicle components.
J1939 is a protocol for shaping the CAN-bus message
J1939 and its companion documents have quickly become the accepted industry standard and the vehicle network of choice for off-highway machines in applications such as construction, material handling, mass transportation, forestry machines, agricultural machinery, maritime and military applications. J1939 is an SAE standard which defines a higher layer protocol for the CAN bus. It specifies exactly how information is exchanged between Electronic Control Units (ECUs) in a vehicle.
Engine ECU has to be simulated using CANtrace
The electronic control unit (ECU) is used in today’s cars and trucks is used to control the engine and other components’ functions and newer vehicles have started using a communication line between different modules on a vehicle so they can share information and redundant sensors do not have to be used. Updating the Vehicle ECU software is done with a computer and a CAN to USB- interface.
CAN traffic is produced by the Engine ECU and simulated using CANtrace. The read value is scaled appropriately and sent over CAN (J1939) to the engine control unit for engine revolution speed control. In the trace view, J1939 parameter groups (PG) are decoded to human readable format. Specification on how the control system should behave, details on how the components are connected, hardware for a test setup, and also support during on-site testing.
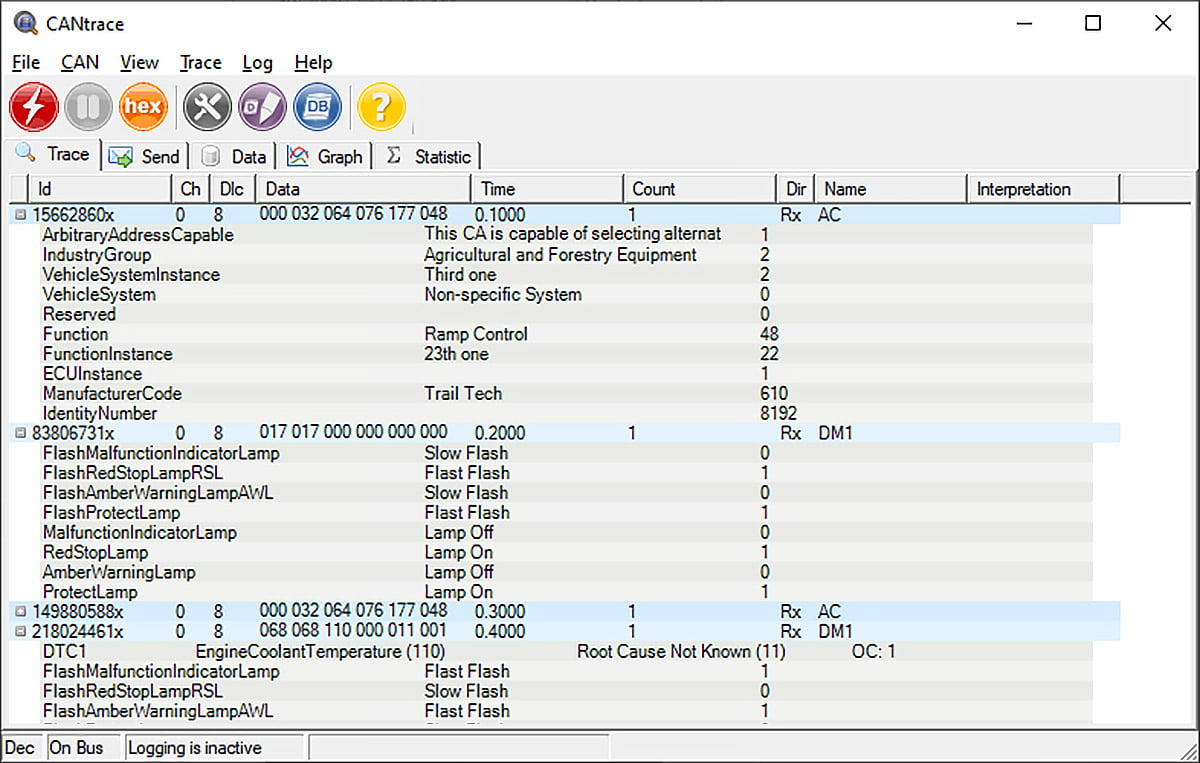
CANtrace with J1939 Data
Logging and playback log file
CANtrace can also play back log files to the CAN bus. Any log file in ASC format can be used to generate data on the CAN bus. This feature can be very useful for simulation, testing and bus traffic generation.
Playback can be “Display only” where data shows up in the trace, data and graph tabs, or playback can be done to CAN bus, transmitting the data on one of the configured CAN channels. The first message in the log file will be played back immediately, regardless of its timestamp. The messages from the log file are sent to one of the other CAN channels, at the rate configured. Playback starts when going on bus, and will continue until reaching the end of the log file and CANtrace will be left on bus when playback is done.
All messages in the log file, regardless of channel, will be sent to the configured CAN bus. The log playback will give an error message if a log file that is not in the Vector ASCII format is opened. The messages from the log file are sent to one of the other CAN channels, at the rate configured. Playback starts when going on bus, and will continue until reaching the end of the log file and CANtrace will be left on bus when playback is done. All messages in the log file, regardless of channel, will be sent to the configured CAN bus.
Combining J1939 database with a customer-specific database
CANtrace also supports combining the included J1939 database with a customer-specific database. This enables the decoding of vehicle-specific parameters. CANtrace can interpret the J1939 protocol. When analyzing a J1939 network, you can enable J1939 interpretation in the trace window to interpret the message ID and/or associate a J1939 database file to interpret the signals. CANtrace also assembles J1939 transport protocol frames and will show the combined long frame in the trace window.
For J1939 format databases, CANtrace is able to mask out both priority, source address and destination address fields which allows the use of compact J1939 databases that works with a variety of different vehicles.

