Introducing the TKE Rover and TKE Driver

TKE Rover brings a new level of creativity to RC cars with groundbreaking wireless applications in CAN technology. It replicates real mobile machines and uses a sophisticated CAN bus configuration, enhanced by wireless CAN interfaces such as the Kvaser Air Bridge. These interfaces enable seamless wireless connectivity between separate CAN bus lines, promoting bidirectional communication. This innovation extends the rover’s capabilities and opens doors to various applications, from wireless control systems to advanced diagnostics. In addition, the TKE Driver app uses the Kvaser BlackBird v2 CAN interface, which facilitates Wi-Fi data transfer between mobile machines and Android tablets. Together, these innovations demonstrate the transformative power of wireless technology in developing CAN communication.
Wireless Innovation of CAN Technology
TKE Rover is a radio-controlled (RC) car used to display new state of the art wireless applications in the field of CAN technology. The TKE Rover implements a CAN bus configuration comparable to real world mobile machine implementations. The implemented CAN bus is used to control the functionality of the rover. With the use of wireless CAN interfaces the functionality of the rover is extended creating new application possibilities. The TKE Rover CAN bus is extended wirelessly using Kvaser Air Bridge CAN interfaces. The interfaces connect two separate CAN-bus lines together wirelessly. The wireless communication between the interfaces is implemented using a point-to-point radio link. The point-to-point radio link enables bi-directional communication between the CAN-bus lines.
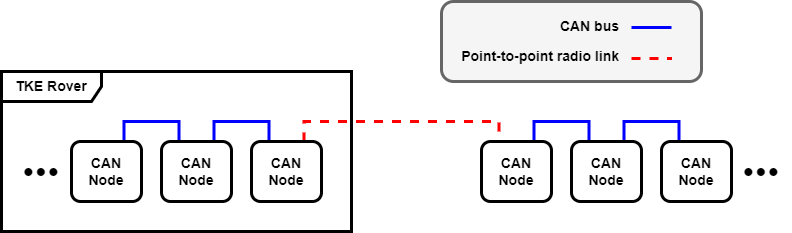
The use of wireless design to extend and connect CAN bus lines together enables development of new types of innovative applications. The concept can be used to create wireless control systems, diagnostics tools, data tracking software and much more.

Human Machine Interfaces
TKE Driver is an android tablet application developed to gather, process and display CAN bus data wirelessly from mobile machine implementations. Data transfer between a mobile machine and the tablet application is implemented using a Kvaser BlackBird v2 CAN interface. Additionally, a battery management module was developed to show battery status in the tablet application. The CAN interface and the tablet form a Wi-Fi connection that allows data to be transferred between the parties. The application can be used to create different types of Human Machine Interfaces (HMI), diagnostic tools, configuration tools and a lot more. Initially the application was developed for driver training purposes, enabling the driving instructor to see the same information as the driver without dangerously leaning over from the passenger seat.
Wireless Integration and Real-World Applications
With the use of wireless CAN interfaces the possibilities of CAN technology are extended. Wireless technology opens possibilities for new and innovative applications with connectivity to traditional CAN bus communication. TKE rover integrates a complete CAN system and receives data wirelessly using the Kvaser Airbridge and Kvaser Blackbird. The Canedudev supplied rover integrates a complete CAN system and demonstrates TKE’s control system expertise. The TKE Driver application is an example of a real-life use case where wireless technology was used to improve the outcome of the project.

